
A City AI Pole / Sentinel physical-AI edge-node is a slim integrated SOLARTODO smart pole that combines local sensing, on-pole AI inference, a drone dock, a docked patrol robot, and power options into one street asset. In this proposed São Paulo old-town flood-control deployment, nodes monitor river-cross-sections, trigger robot inspection, and share evidence with a transport authority to shorten response-time decisions.
Holiday Flood-Control Brief
This illustrative São Paulo deployment is framed as a transport-authority operations plan for the old-town core during holiday travel and retail peaks. The focus is not a generic smart-city showcase. It is a flood-control workflow for streets, bus approaches, bridge ramps, station surroundings, and underpass-adjacent corridors that can lose operational reliability when intense rain coincides with heavier pedestrian and vehicle movement. São Paulo’s historic center and adjacent older districts sit within a dense street grid shaped by viaducts, canalized waterways, culverted streams, and hard-to-clear curb inlets. When rainwater accumulates near a crossing, the first operational question for a transport authority is practical: keep vehicles moving, hold service, reroute, or close a vulnerable approach before passengers and crews are exposed to avoidable disruption.
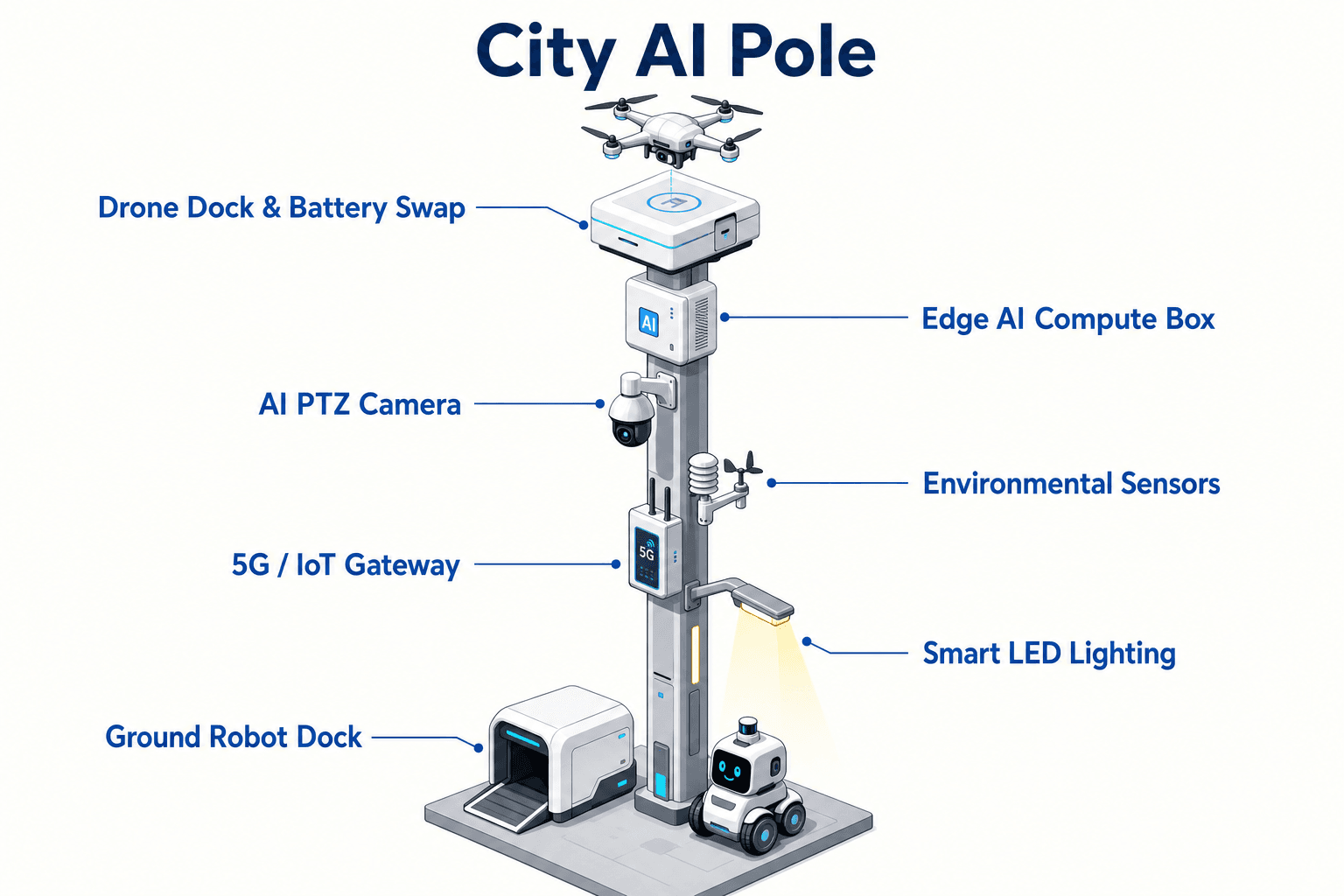
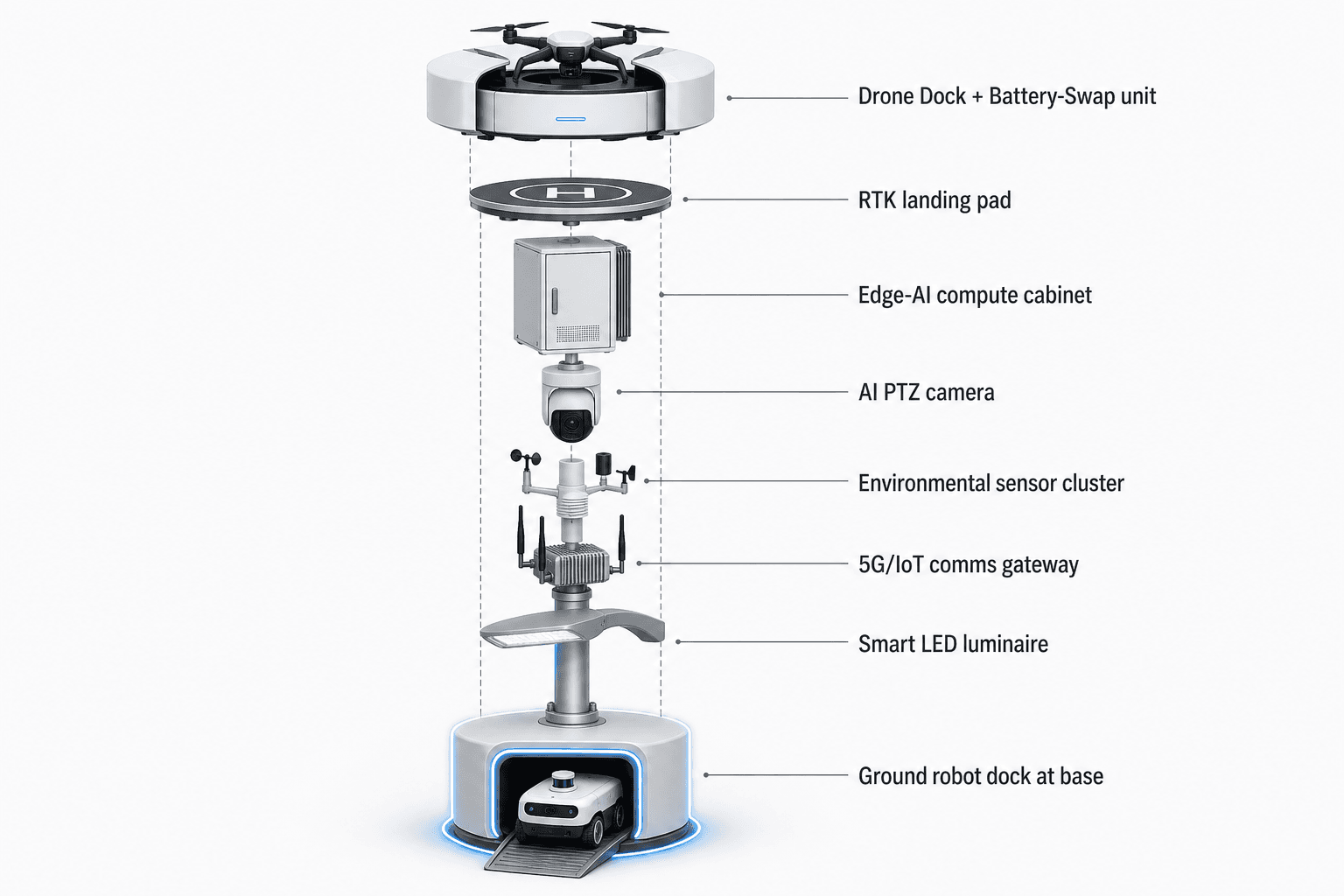
The proposed SOLARTODO Sentinel configuration is a custom city-edge-node pole, subject to final engineering confirmation, positioned as a shared evidence point rather than a departmental gadget. Each slim cylindrical or octagonal pole uses a brushed-metal body, midnight-blue photovoltaic mid-section, and cyan LED accent rings. The pole integrates the weather/environment sensor, PTZ camera, embedded edge-AI accelerator, drone dock, and ground patrol robot into one street asset. For the holiday trigger, the operating assumption is that the transport authority needs faster confidence when several departments are watching the same storm from separate screens. The weather sensor becomes the first local trigger, the robot becomes the field verifier, and the response-time KPI becomes the common measure across transport, drainage, civil-defense, and event operations teams.
River-Cross-Section Deployment Pattern
The deployment mode is river-cross-section, meaning each proposed node is planned around a perpendicular operational slice of risk: bank edge, channel or river, bridge or culvert interface, approach road, bus stop zone, pedestrian path, curb inlet, and return route for a robot patrol. In São Paulo, this pattern is relevant around corridors influenced by the Tietê, Pinheiros, Tamanduateí, and smaller canalized or covered waterways that affect the old-town mobility network. The plan does not assume a fixed quantity of poles or a defined coverage area. Final spacing, mounting points, power design, and permissions would be confirmed by civil, electrical, drainage, and transport engineering review.
A Sentinel pole at such a cross-section is configured to read the local weather/environment condition, run on-device inference, and initiate field verification without waiting for a cloud round-trip. The PTZ camera gives the operations center a directed view of water accumulation, blocked drainage points, traffic behavior, and pedestrian exposure. Optional 4D radar or LiDAR can be evaluated where visibility, geometry, or traffic movement makes camera-only assessment insufficient, subject to site survey. The top-mounted white SOLARTODO drone dock/nest with clamshell roof supports a generic quadcopter for short aerial checks of the crossing and nearby approaches. Its precision RTK landing pad and automated battery hot-swap magazine are used to minimize downtime without claiming a fixed swap duration.
The base-mounted patrol robot is central to this old-town plan. In narrow streets, shadowed underpasses, and curbside zones where rainwater depth or debris can be hard to assess from one camera angle, the docked robot provides closer verification. A quadruped or wheeled form factor would be selected after route inspection, surface review, and safety assessment.
Weather Sensor to Robot Tasking
The module focus is the weather sensor, but the operating value comes from how it starts the robot task. In the proposed workflow, the weather/environment sensor is not treated as a passive data feed. It is a local trigger tied to flood-control thresholds set by the transport authority and partner departments. When conditions move toward an alert band, the pole’s embedded edge-AI accelerator correlates local sensor input with camera context and predefined operational rules. Routine triage happens at the pole, with low-latency on-device inference and no cloud round-trip for the first classification step.
Once the local event is scored, the patrol robot can be dispatched from the pole base for a short inspection route, subject to safety rules and route approval. The robot may verify curb inlet blockage, observe standing water at the edge of a bus lane, inspect the underside of a bridge approach from a permitted path, or confirm whether a pedestrian route is still passable. The robot returns to the base dock for auto-charging, keeping the pole as the integrated operating point rather than creating a separate robot program. The drone remains a supporting module for overhead context when line-of-sight, access, or safety conditions justify flight.
For a transport authority, the distinction matters. A remote weather alert alone can be too abstract to trigger a service decision. A field call alone can arrive late. A camera image alone can be disputed by another department viewing a different system. The Sentinel pole is proposed as a local evidence loop: weather trigger, edge classification, robot verification, PTZ review, optional aerial view, and a shared event record. That sequence is designed to reduce the time between local risk signal and operational decision, while leaving final action with authorized city personnel.
Cross-Department Silo Breaker
The core pain point is cross-department silo behavior. Flood-control decisions in a large city often require transport operations, drainage maintenance, traffic control, civil defense, public safety, sanitation contractors, and event managers to agree quickly on what is happening. In an old-town holiday period, the stakes rise because an avoidable delay can affect bus headways, station access, taxi and ride-hailing zones, delivery windows, emergency routes, and crowd movement near retail streets. The proposed Sentinel deployment is not presented as replacing those departments. It is a field node that creates one time-stamped evidence packet from a specific river-cross-section.
The transport authority can use that packet to coordinate a decision without asking every team to start from its own sensor, camera, field call, or chat thread. The packet can include the weather-sensor trigger, edge-AI event classification, PTZ snapshots or clips according to local policy, robot inspection notes, optional drone context, operator decisions, and follow-up status. Data governance, retention, access controls, and integration with the authority’s systems would be specified during engineering and policy design.
This matters because the transport authority’s KPI is response-time, not sensor volume. If a drainage team sees rainfall, traffic staff sees congestion, and field supervisors see water at different times, the shared question becomes delayed. The proposed pole changes the coordination pattern by anchoring the conversation to one cross-section and one incident record. The weather sensor starts the event, but the robot makes it operationally concrete: it can confirm whether the issue is a wet pavement condition, a blocked path, a rising water hazard, or a drainage obstruction requiring a different responder.
Response-Time Evaluation Plan
The evaluation plan treats response-time as a target metric, not an achieved result. Before deployment, the transport authority would define the baseline process for holiday flood-control decisions at selected river-cross-sections: how an alert is currently received, who validates it, who authorizes a transport action, and how the action is recorded. The Sentinel configuration would then be evaluated against that baseline using time stamps from the weather sensor, edge classification, robot dispatch, operator acknowledgement, field action, and closure note. The intent is to measure whether the integrated pole shortens the decision path and improves confidence, subject to final engineering confirmation.
No specific detection rate, response-time improvement, deployment quantity, or coverage area is claimed. A credible pilot would start with planning assumptions, controlled operating rules, and a clearly defined holiday watch period. The transport authority would predefine route classes, alert severity bands, robot no-go conditions, drone authorization rules, and escalation contacts. Each event would be reviewed for whether the weather trigger was meaningful, whether robot verification added useful context, whether the shared packet reduced duplicate calls, and whether the final decision was recorded cleanly.
Operationally, success is framed as better tempo and clearer accountability. The transport authority should be able to see when the local condition started, when the pole classified it, when the robot checked it, when the responsible team accepted the incident, and when the corridor decision was made. That record helps refine future thresholds, patrol routes, staffing plans, and interdepartmental playbooks for the next holiday period without claiming that the equipment alone solves São Paulo’s flood-control challenge.
System Configuration
| Parameter | Configuration |
|---|---|
| Pole form | Slim cylindrical or octagonal brushed-metal Sentinel pole with midnight-blue photovoltaic mid-section and cyan LED accent rings, final mounting subject to site engineering confirmation. |
| Weather sensor focus | On-pole weather/environment sensor package used as the primary local trigger for flood-control thresholds at a São Paulo river-cross-section. |
| Edge AI compute | Ventilated on-pole cabinet with embedded edge-AI accelerator for on-device inference, low-latency triage, and no cloud round-trip for routine classification. |
| Ground patrol robot | Generic quadruped or wheeled patrol robot docked at the pole base with auto-charging, configured for approved curbside and crossing inspection routes. |
| Drone unit | White SOLARTODO drone dock/nest with clamshell roof, generic quadcopter, precision RTK landing pad, and automated battery hot-swap magazine. |
| Visual and optional sensing | PTZ camera for directed inspection, with optional 4D radar or LiDAR evaluated where site geometry and visibility require additional sensing. |
| Power configuration | Grid or wind-solar hybrid power design, selected after utility access, solar exposure, wind feasibility, and maintenance access are reviewed. |
How It Works
- Weather/environment sensor crosses a locally defined flood-control threshold at the river-cross-section.
- On-pole edge AI correlates the trigger with PTZ camera context and scores the event.
- Patrol robot leaves the base dock on an approved route to verify curb, inlet, and approach conditions.
- Drone launches only when authorized overhead context is needed for the crossing or nearby approaches.
- Transport operations receives one shared event packet for decision, routing, and escalation.
- The system records sensor time stamps, robot observations, operator action, and closure status for response-time review.
Planning Assumptions (Indicative)
Illustrative planning inputs a buyer can recompute — target metrics, not achieved results. Subject to final engineering confirmation.
| Metric | Planning assumption | Indicative value |
|---|---|---|
| Robot inspection substitution | Patrol robot handles selected first-look checks that would otherwise require manual observation during a holiday flood watch. | ~3 to 5 inspection rounds per watch automated as a planning input. |
| Response-time scoring | Transport authority measures elapsed time from weather-sensor alert to operator decision using shared event time stamps. | ~10 to 15 minute planning window for evaluation, adjusted by route class. |
| Cross-department handoff | One event packet is shared across transport, drainage, civil-defense, and field supervision teams instead of separate informal updates. | ~1 common incident record per validated alert. |
| Holiday watch review | Operations supervisors review threshold quality, robot usefulness, and decision routing during and after each holiday watch. | ~2 review cycles per watch period. |
| Manual escalation filtering | Edge classification and robot verification help separate watch-only conditions from conditions requiring field escalation. | ~4 alert categories for planning: observe, verify, reroute, close. |
Deployed Equipment
- SOLARTODO Sentinel slim smart pole body with photovoltaic mid-section and LED accent rings
- Weather/environment sensor module for local flood-control thresholding
- Ventilated on-pole edge-AI cabinet with embedded edge-AI accelerator
- PTZ camera for directed corridor and crossing inspection
- White SOLARTODO drone dock/nest with clamshell roof, RTK landing pad, and battery hot-swap magazine
- Generic quadcopter configured for authorized aerial context checks
- Generic docked patrol robot with auto-charging at the pole base
- Optional 4D radar or LiDAR module, subject to site confirmation
Frequently Asked Questions
Is this proposed São Paulo project a drone or robot purchase?
No. The proposed configuration is an integrated city pole deployment centered on SOLARTODO Sentinel as a physical-AI edge node. The drone and patrol robot are modules within the pole’s operating workflow. They are not presented as standalone products or separate programs, and their configuration depends on final engineering confirmation.
Why is the transport authority the lead stakeholder for a flood-control scenario?
The transport authority is the stakeholder most directly accountable for keeping corridors, bus approaches, bridge ramps, station access, and diversion routes usable during rain events. Drainage teams may own water removal work, but transport operations must decide whether to reroute, hold, restrict, or reopen mobility assets when flood risk affects service.
How does the weather sensor improve the response-time KPI?
The weather/environment sensor provides the first local trigger at the river-cross-section, so the event can be classified at the pole before teams wait for a distant report or manual field call. It starts a measured sequence that includes edge triage, robot verification, operator acknowledgement, and a recorded transport decision.
What does the patrol robot add that a fixed camera cannot provide?
A fixed PTZ camera can inspect visible areas, but an old-town crossing may include curb shadows, bridge approaches, underpass edges, blocked inlets, and pedestrian paths outside the best camera angle. The docked robot can perform an approved close-range patrol route and return to auto-charging, adding field context to the shared incident record.
Does the pole require cloud processing to make the first decision?
Routine first-stage classification is designed for on-device inference using the on-pole embedded edge-AI accelerator, so the system does not depend on a cloud round-trip for initial triage. External systems may still receive records, video, and operator decisions according to the authority’s integration, governance, and retention policies.
What must be confirmed before a real São Paulo installation?
Final deployment would require engineering review of pole placement, structure, utility access, grid or wind-solar hybrid power, robot route safety, drone authorization rules, data governance, maintenance access, and integration with transport operations systems. The proposed plan is a configurable B2B deployment model, not a claim of completed field performance.
Explore Further
- City AI Pole / smart streetlight product line
- More smart-city deployment cases
- Talk to our engineering team
Planning a similar physical-AI deployment for streets, campuses or public spaces? Request an engineering consultation