
A City AI Pole, in this case SOLARTODO Sentinel, is an integrated physical-AI edge-node pole that combines sensing, on-pole inference, drone docking, ground-robot docking, and hybrid power options in one city asset. The proposed Nairobi deployment supports industrial-park perimeter monitoring after severe-weather disruption, helping eco-environment teams coordinate patrol, evidence capture, and coverage evaluation.
Procurement Context
This proposed Nairobi case is framed as a procurement evaluation for an industrial-park campus that needs faster perimeter recovery after severe weather, flooding, debris movement, utility interruption, or temporary access constraints. The target buyer is an eco-environment stakeholder group: site environmental managers, county-facing compliance teams, safety officers, and facilities operators who must document conditions around drainage channels, service roads, loading areas, green buffers, fuel-handling zones, and boundary fencing.
The seasonal trigger is typhoon-season readiness, handled carefully for Nairobi. Nairobi itself is not in a typhoon belt. In this procurement case, the phrase is used as a regional resilience calendar adopted by multinational tenants and logistics teams that synchronize severe-weather continuity planning across markets. Locally, the engineering concern is heavy rain, wind, runoff, standing water, storm damage, and access disruption that can follow intense weather events. The deployment mode is post-disaster infill: Sentinel poles are added to priority gaps after a disruption exposes blind spots in a campus perimeter, rather than replacing every existing light pole or camera at once.
The core pain point is cross-department siloing. Environmental teams may hold inspection logs, security teams may hold video, facilities teams may control patrol schedules, and operations teams may receive incident calls first. During a recovery window, that separation slows decisions. The procurement objective is therefore not to buy a drone, robot, or camera as separate equipment. It is to evaluate one integrated city edge-node pole that can create a shared perimeter evidence layer, with configuration subject to final engineering confirmation.
Site Scenario
The scenario is a campus-perimeter route around a Nairobi industrial park with mixed warehouse, light manufacturing, logistics, parking, and service-yard activity. The most relevant edges are not only public-facing gates. They include rear drainage corridors, fence lines next to informal pedestrian paths, temporary contractor access points, utility cabinets, culverts, waste-handling corners, and buffer zones between industrial plots and neighboring roads or settlements.
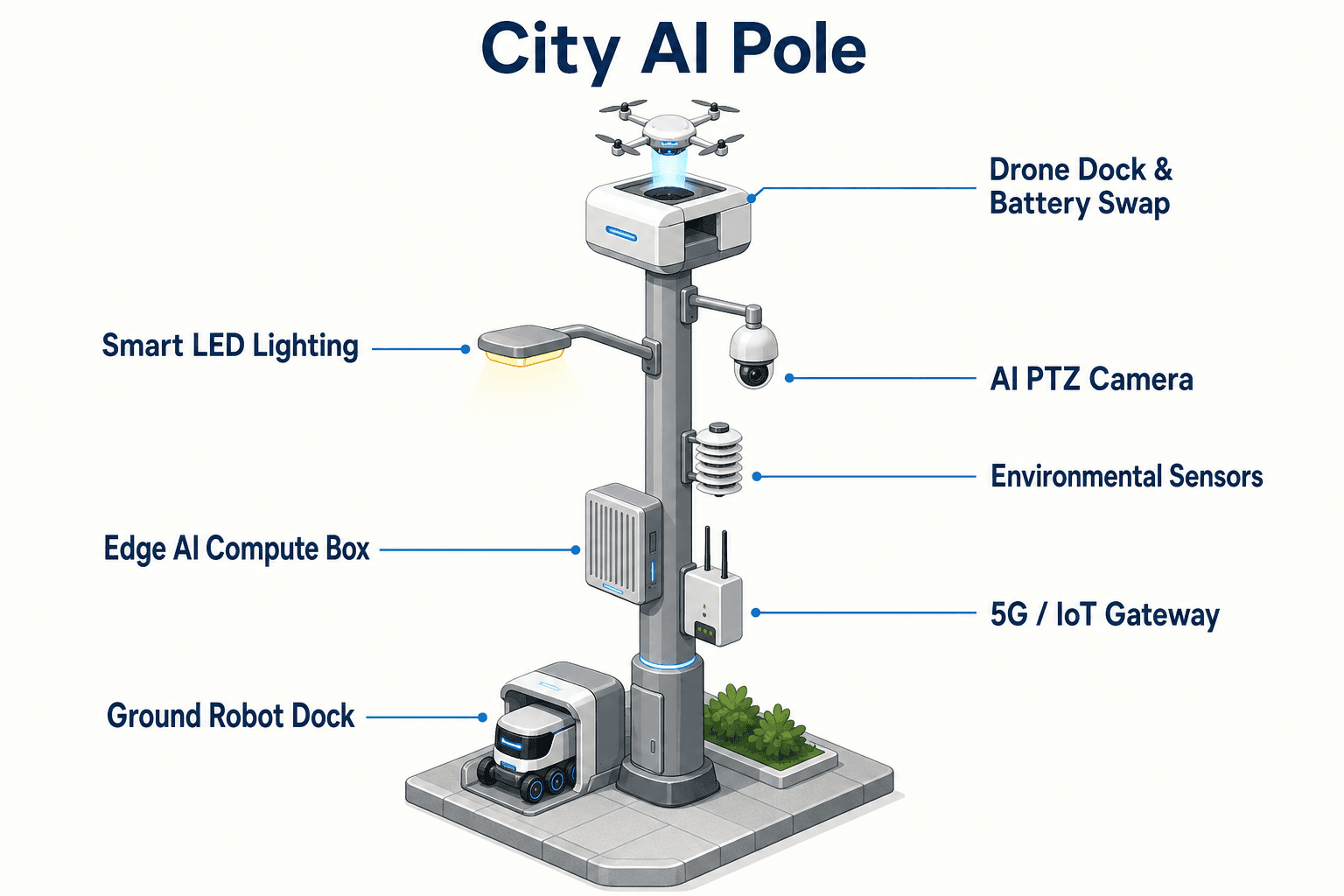
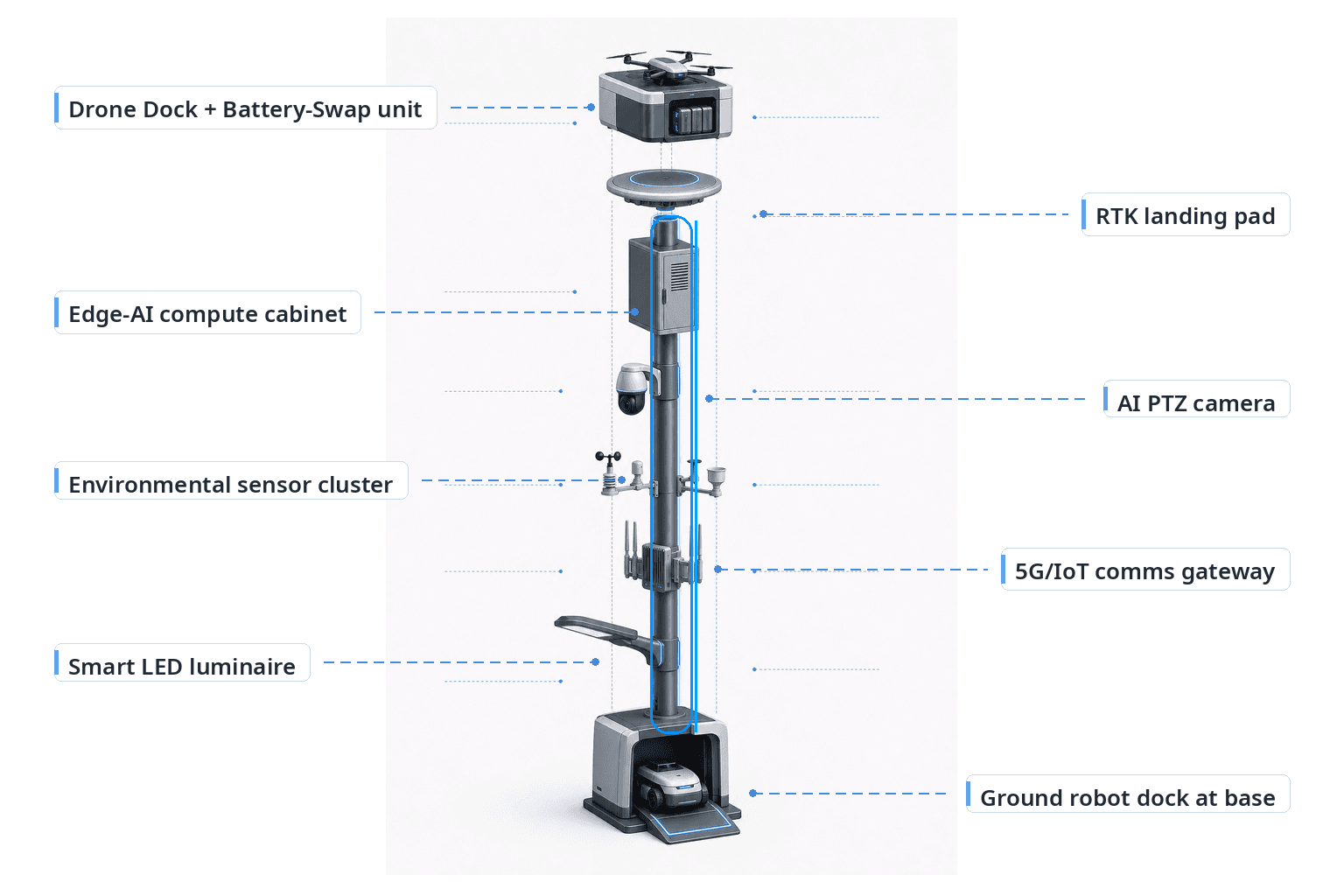
After a severe-weather event, manual inspection often becomes fragmented. Security may focus on access control, environmental staff may focus on runoff or spill risk, and facilities crews may prioritize blocked drains or damaged lighting. The proposed SOLARTODO Sentinel placement fills selected gaps with poles that can observe, patrol, and record from the same physical location. A Sentinel pole has a brushed-metal body, midnight-blue photovoltaic mid-section, cyan LED accent rings, a white SOLARTODO drone dock with clamshell roof, and a ground-unit docking position at the base. The visual identity matters in a B2B deployment because the asset must be recognizable to guards, maintenance teams, tenants, and visiting contractors as part of the industrial park's resilience system.
For this use case, the ground robot is the module focus. A generic quadruped or wheeled patrol robot docks at the pole base for auto-charging and is tasked to inspect areas where a fixed camera view is blocked by trucks, stacked materials, vegetation, temporary fencing, or standing water. The drone remains part of the integrated pole for overhead checks and route confirmation, but the procurement case emphasizes ground-level evidence: fence integrity, debris against drains, access obstruction, pooling near sensitive storage, and close-range condition records that a high-mounted camera may not capture.
Proposed Configuration
The proposed Sentinel configuration is a custom project design, subject to engineering confirmation. The pole is treated as one city edge node, not a standalone drone system or standalone patrol robot. Each node integrates the pole body, sensing, on-device inference, drone dock, ground-robot dock, power pathway, and local evidence workflow.
At the top, the white SOLARTODO dock and clamshell roof protect a generic quadcopter between missions. The drone uses a precision RTK landing pad and a battery hot-swap magazine for rapid automated battery change to reduce downtime, without relying on a stated swap duration. The drone can launch for route overview, roofline checks, and verification of inaccessible edges, but it remains part of the integrated pole deployment.
At the base, the patrol robot docks and auto-charges. This ground unit is configured around the campus-perimeter scenario: short inspection loops, slow-speed close observation, and return-to-dock behavior when its task is complete or when the system needs to preserve availability. For an eco-environment buyer, the robot's value is in repeatable condition capture. It can follow the same inspection path after each weather event, giving teams comparable records of drains, soil disturbance, waste areas, boundary vegetation, and low-level access points.
The pole cabinet contains an embedded edge-AI accelerator in a ventilated enclosure. The system performs on-device inference for low-latency decisions without requiring a cloud round-trip for every event. A PTZ camera, weather and environmental sensor package, and optional 4D radar / LiDAR support the detection layer. Power may be grid-connected or wind-solar hybrid depending on site load, shading, utility availability, and final engineering validation.
Coverage KPI
The KPI framing for this procurement case is coverage. Coverage is defined as the planned share of priority perimeter checkpoints, inspection paths, and event records that can be observed by the fixed pole sensors, reached by the ground robot, or verified by the drone when conditions require an overhead view. This is an evaluation metric, not a claimed achieved outcome.
For Nairobi industrial parks, coverage should be planned around operational realities rather than a simple map radius. A long boundary beside a drainage reserve may need more frequent ground inspection than a clear wall facing an internal service road. A gate with guards may already have human visibility, while a rear culvert may need sensor confirmation after heavy rain. A loading yard may be visible from a PTZ camera in the daytime but become visually complex at night due to parked trailers and temporary materials. The Sentinel node is proposed as a way to turn those differences into a coverage plan that departments can evaluate together.
The cross-department silo problem is addressed by using one detect-decide-act-record loop. Environmental teams define inspection priorities, security teams validate perimeter anomalies, facilities teams receive maintenance evidence, and operations teams review continuity status. The ground robot improves the coverage KPI by extending the pole's inspection reach at low level, especially where a fixed camera is partially obstructed or where post-disaster debris changes the site layout.
During procurement, the buyer should set target checkpoints, patrol windows, exception categories, data retention rules, and escalation roles before final design. Engineering confirmation should then validate pole placement, robot path safety, drone launch constraints, wireless or wired backhaul, power resilience, mounting permissions, and environmental exposure.
Procurement Path
A credible procurement path begins with a joint perimeter survey. The site team marks known post-disaster gaps: flooded corners, damaged fence sections, runoff paths, dark zones, traffic conflict areas, and places where manual patrol reports often arrive late or incomplete. The eco-environment stakeholder then ranks these gaps by inspection importance, not by technology preference.
The second step is a node configuration workshop. SOLARTODO Sentinel should be specified as a complete physical-AI pole with the required sensor mix, embedded edge-AI accelerator, drone dock, ground-robot dock, and power mode. The buyer should avoid fragmenting the requirement into separate device lots unless there is a clear integration plan, because the value in this case depends on coordinated evidence capture at the perimeter.
The third step is an evaluation protocol. Before installation, departments agree how coverage will be tested: which checkpoints count, which patrol loops are in scope, what creates an exception, who reviews a robot or camera finding, and what records must be retained for internal environmental governance. This prevents the deployment from becoming another silo owned by only one department.
The final step is engineering confirmation. Nairobi site conditions can vary significantly by drainage, dust, access control, road geometry, radio environment, shading, tenant activity, and utility stability. The proposed deployment should therefore be treated as an illustrative procurement case until civil, electrical, safety, airspace, communications, and operating procedures are confirmed. The expected value is qualitative and operational: better shared visibility, more consistent post-disaster inspection, and a clearer way to evaluate perimeter coverage.
System Configuration
| Parameter | Configuration |
|---|---|
| Pole form | Slim cylindrical/octagonal brushed-metal pole with midnight-blue photovoltaic mid-section and cyan LED accent rings |
| Edge AI compute | On-pole ventilated cabinet with embedded edge-AI accelerator for on-device inference and low-latency local decisions |
| Drone unit | White SOLARTODO dock/nest with clamshell roof, generic quadcopter, precision RTK landing pad, and battery hot-swap magazine |
| Ground unit | Generic quadruped or wheeled patrol robot docked at pole base with auto-charging for perimeter inspection loops |
| Sensing | PTZ camera, weather/environment sensors, and optional 4D radar / LiDAR for selected perimeter conditions |
| Power | Grid connection or wind-solar hybrid configuration, subject to site load and engineering confirmation |
How It Works
- On-pole PTZ camera or environmental sensor flags a perimeter anomaly.
- Embedded edge-AI accelerator classifies the event locally and assigns a review priority.
- Ground robot leaves the base dock to inspect the checkpoint at close range.
- Drone launches only when overhead verification is needed for access, roofline, or route context.
- The node records synchronized evidence for eco-environment, security, facilities, and operations review.
- Teams close the event, update the coverage map, and adjust the next patrol plan.
Planning Assumptions (Indicative)
Illustrative planning inputs a buyer can recompute — target metrics, not achieved results. Subject to final engineering confirmation.
| Metric | Planning assumption | Indicative value |
|---|---|---|
| Inspection coverage | Target priority checkpoints are mapped before deployment and assigned to fixed camera, ground-robot, or drone verification | ~20-40 checkpoints planned per campus phase |
| Ground patrol frequency | Ground robot is scheduled for repeatable perimeter loops after severe-weather events and during recovery shifts | ~3-6 patrol loops per active day |
| Manual escalation load | Only classified exceptions are escalated to human teams after edge review and local evidence capture | ~5-10 exception categories defined |
| Evidence consistency | Departments agree common record fields for environmental, security, and facilities review | ~1 shared event log per node |
| Post-disaster infill priority | Initial pole placement focuses on gaps proven by prior access disruption, flood exposure, or perimeter blind spots | ~3 priority tiers for deployment sequencing |
Deployed Equipment
- SOLARTODO Sentinel smart pole body with photovoltaic mid-section
- White SOLARTODO drone dock/nest with clamshell roof
- Generic quadcopter with RTK landing support
- Battery hot-swap magazine for drone operations
- Ground patrol robot with base auto-charging dock
- PTZ camera and weather/environment sensor package
- Ventilated edge-AI cabinet with embedded edge-AI accelerator
- Optional 4D radar / LiDAR module
Frequently Asked Questions
Is this a drone project or a robot project?
No. The procurement case is for SOLARTODO Sentinel as an integrated city edge-node pole. The drone and ground robot are modules of the pole system, supported by on-pole sensing, edge inference, docking, power, and evidence workflows. The Nairobi scenario emphasizes the ground robot because campus-perimeter conditions often require close-range inspection after severe weather.
Why is the buyer framed as an eco-environment stakeholder?
The target problem is not only security intrusion. Industrial-park operators in Nairobi also need to document runoff, blocked drains, waste-area conditions, fence-line disturbance, and environmental exceptions after disruptive weather. Eco-environment stakeholders can use the shared evidence loop to coordinate with security, facilities, and operations without maintaining separate field records.
How does the deployment address cross-department siloing?
The proposed workflow creates one operational record from detection through inspection and closure. A camera or sensor may flag the event, edge AI classifies it locally, the ground robot gathers close evidence, and departments review the same event record. This structure helps prevent separate patrol notes, video clips, and maintenance observations from drifting into disconnected systems.
What does post-disaster infill mean in this case?
Post-disaster infill means Sentinel poles are proposed for the perimeter gaps revealed by a disruption, rather than assuming a uniform replacement of existing infrastructure. The buyer first identifies blind spots, blocked access routes, drainage exposure, and inspection delays, then places nodes where they can improve target coverage. Final placement remains subject to engineering confirmation.
How should coverage be evaluated during procurement?
Coverage should be evaluated as a planning metric across checkpoints, patrol paths, exception categories, and evidence records. The buyer can define which perimeter locations require fixed observation, which need ground-robot inspection, and which require drone verification. The procurement team should treat the numbers as target inputs to be tested, not as achieved deployment results.
Why mention typhoon-season for Nairobi if Nairobi is not in a typhoon belt?
In this case, typhoon-season is used as a procurement calendar for severe-weather readiness across regional operations, not as a claim about Nairobi's local cyclone exposure. The Nairobi engineering basis should focus on heavy rain, wind, runoff, flooding, access disruption, and debris conditions that can affect industrial-park continuity and environmental inspection.
Explore Further
- City AI Pole / smart streetlight product line
- More smart-city deployment cases
- Talk to our engineering team
Planning a similar physical-AI deployment for streets, campuses or public spaces? Request an engineering consultation